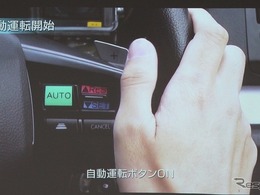
28日、北海道女満別、ボッシュのテストコースで、開発中の自動運転車両・ADAS技術搭載車両の試乗会が開催された。当日は雨天予報もあり実験車両の試乗が危ぶまれたが、弱い雨のなか自動運転のデモ走行が実施された。デモ走行に利用された車両は、高速道路での自動運転(ハイウェイパイロット)を目指したもので、ホンダ レジェンドハイブリッドをベースにしている。周辺認識のために、長距離ミリ波レーダー2基、中距離ミリ波レーダー4基、ステレオビデオカメラ1、高精度GPS受信機、ライダー6基が搭載されている。車の制御は電動パワーステアリング(操舵)と横滑り防止装置(加減速)によって行う。試走コースはおよそ2km。シナリオは、発進後、高速道路に乗ったという想定で自動運転可能な状態になってから自動運転に切り替える。続いて左コーナーにさしかかり自動で減速、そのままコーナーをクリアする。その後遅い車に追いつくが、右後方からの車を1台見送る。再び追い越しを行う。最後は、高速道路を降りるという設定で自動運転から手動運転に切り替えるというものだ。ハイウェイパイロットを想定した実験のため、高速道路の区間のみ自動運転を行うというシナリオになっている。EUでもまずは高速道路での自動運転を前提としたすべての高速道路の高精度の3Dデータを作成中だ。実用化されるときは、おそらく事前に登録された位置情報によって高速道路を認識し、自動運転には高精度の3Dマップデータを利用する方式になると思われる。実験走行のとき、ちょうど雨が降りだした。開発中ということもあり、雨天、ウェットだと白線をうまく認識できない可能性があり、試乗走行は中止になるかもしれない状態だったが、担当者の判断は「この程度の雨ならいける」という判断だった。雨はそれなりの時間が経っており、路面はウェット状態。昼間なので白線はいちおう見える状態だが、ワイパーはLoで動かさなければだめな状態だ。自動運転時の設定速度は100km/h。80km/hくらいの速度に達したときコーナーにさしかかるため減速が始まる。今回の設定ではコーナーは0.2G以下で曲がるように、速度と舵角が制御される。コーナリングスピードはだいたい60km/hだった。前の遅い車に接近する。このとき右車線には別の車が迫っているため、追い越しはせず前車の追従走行となる。右車両をやりすごすが、直線に入ると今度は右車線が空いているので前車を追い越してもとの車線にもどった。この間、ドライバーは基本的にハンドルに手を触れていない状態だ。雨で車線を見失うこともなかった。実験車両には6基のライダーが装着されていたが、センシングはステレオカメラとミリ波レーダーによって行っているといい、ライダーはバックアップとして利用しているだけだそうだ。スピードの高い高速道路ではより遠くの状態をセンシングする必要があるため、200m以上先の物体を検知できるレーダーが欠かせない。
RAYSが向き合う “ 性能 ” と “ 自己表現 ” …30年目の『TE37』がWEKFESTへ 2026.7.2 Thu 16:00 「WEKFEST JAPAN」が今年も5月3日にポートメッセ名古屋で開催さ…
蘇った「CB-F」はサーキットでも楽しいのか? スペンサー用にカスタム、特別なホンダ『CB1000Fレーサー』をことりちゃんが試す 2026.6.26 Fri 18:30 今回はわたくし、“ことりちゃん”こと小鳥遊レイラが所属してい…
 RAYSが向き合う “ 性能 ” と “ 自己表現 ” …30年目の『TE37』がWEKFESTへ
RAYSが向き合う “ 性能 ” と “ 自己表現 ” …30年目の『TE37』がWEKFESTへ






























![軽カーの“黄色いフチ”も隠せるおしゃれ「ナンバープレート枠」、新色続々![特選カーアクセサリー名鑑]](/imgs/p/h_qLlAraJVMaGW9nq6wZtJmorKdlpaSjoqGg/144140.jpg)









