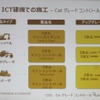
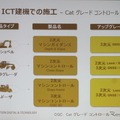
自動運転関連の技術は、なにも自動車に限ったものではない。重機や建機のリモートコントロール、無人走行、自動施工といった技術の市場投入は10年以上前にさかのぼることができる。遠隔操作で水中に入り川底の土砂をすくうショベルカーや露天掘り鉱山などで無人走行する大型トラックの映像を見たことがあるだろう。近年、とくに開発が進むのがGPSや3Dデータを駆使した、自動施工支援技術だ。重機の稼働や移動を管理・制御するだけでなく、穴掘り、整地、締固めを自動化する。事前の測量した3Dデータをもとに、施工計画をシミュレーションしプログラムすれば、あとは重機がほぼ自動で作業をしてくれる。例えるなら、3Dプリンタやレーザーカッター、あるいはNC制御のようにショベルカーやブルドーザーが動いて、任意の形状で地面を掘ったり決まったエリアの整地したりするようなイメージだ。キャタピラーでは、このような機能をGPSやセンサー技術、クラウドネットワークを組み合わせた「CAT Connect」というテクノロジーでサポートしている。このうち、CAT グレードコントロールという技術では、ドローンや3Dスキャナで計測した現場のデータを、CADやシミュレータによって施工内容を計算すると、GPSやスキャナーを搭載した重機(パワーショベル、ブフドーザ)が、ブームやアタッチメントのセンサー情報によって、シミュレーションどおりの正確な作業を行ってくれる。オペレータはガイダンスに従ってレバーを操作するだけで、微妙な調整や施工状況の確認はほとんど必要ない。GPSデータや3Dスキャナーを利用せず重機のセンサーのみで、指定された穴掘りや整地を行う2Dモードのグレードコントロールも用意されている。振動ローラによる締固めも、センサーが施工面の状況を計測しながら可能だ。オペレータはローラから降りることなく、設定どおりの固さに整地できる。通常ローラ本体に加速度センサーを取り付けて地面の固さを計測するが、同社の場合、ローラの転がり抵抗で判断するため、振動させない状態でも施工を自動化できる。また、油圧ショベルやホイールローダーのバケットには重量センサーが取り付け可能であり、作業しながらの計測で、過積載、過小積載を防止できる。これらのデータはクラウドにもアップロードされ、本社や事務所がリモートで現場の作業状況、生産性が把握できる。キャタピラーでは、これらのICTと重機を組み合わせたソリューションを工事現場や農場などに展開しているが、無人運転や自動施工支援技術は、重機の災害派遣にも役立てているという。災害現場では二次災害の危険から、オペレータを乗せた状態では現場で動かすことができない場合もある。熊本地震の阿蘇大橋の災害現場では、24トンクラスの油圧ショベルが10台ほど提供したという。
洗車ビジネスや24時間無人ジムFC、省力化・DXの提案に注目…2026年度「大阪 SSビジネス見本市」が開催 2026.6.12 Fri 8:16 全国石油業共済協同組合連合会(全石連)主催の『2026年度 SSビ…
何回見てもいい! ホンダ『プレリュード』特別仕様車…「2027 リミテッドエディション」にSNS絶賛! 2026.6.24 Wed 5:53 ホンダは、スペシャリティスポーツモデル『プレリュード』新型…
 洗車ビジネスや24時間無人ジムFC、省力化・DXの提案に注目…2026年度「大阪 SSビジネス見本市」が開催
洗車ビジネスや24時間無人ジムFC、省力化・DXの提案に注目…2026年度「大阪 SSビジネス見本市」が開催





























![首相公用車のトヨタ『センチュリー』6年ぶり更新、セダン型から「走る執務室」のSUVへ[新聞ウォッチ]](/imgs/p/h_qLlAraJVMaGW9nq6wZtJmorKdlpaSjoqGg/143351.jpg)