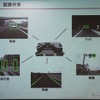
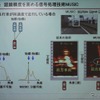
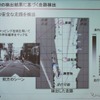
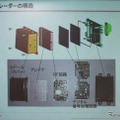
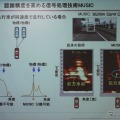
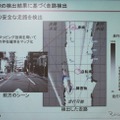
高度運転支援、自動運転、自律走行など、広義の自動運転を意味する言葉はいくつかあるが、これらの境界の定義は難しい。自動化の範囲によってレベル0から4までの分類があるが、抽象的な表現のため、特定の車両がどこまでを実現しているものかもわかりづらい。個々の技術に至っては、それらは高度運転支援から完全自律走行車を構成するための要素(技術)でしかないので、例えば、カメラで画像認識を行っているからといって、自動運転レベルの特定はできない。しかし、用途や目標とする機能が明確ならば、有効な技術やその組み合わせはある程度規定できる。デンソー ADAS推進部長 松ケ谷和沖氏によれば、現状の衝突軽減ブレーキシステム、緊急自動ブレーキシステムには、ミリ波レーダーとカメラの組み合わせがベストだとする。これにアクセル(走る)操作、ステアリング操作(曲がる)といった自動運転の機能を追加しようと思ったら、さらにLIDARと呼ばれる赤外線3Dレーザースキャナーも必要となるいう。衝突回避のための自動ブレーキに必要な機能は、前方の走行車両や歩行者、障害物の検知と、どのような状況で衝突すると判断するかの判断ロジックだ。カメラと画像処理技術を組み合わせれば、車両、歩行者、障害物の認識は可能だ。その対象までの距離についても、画像解析で計算することは不可能ではないが、デンソーとしてはミリ波レーダーによる計測をベストとする。デンソーはミリ波レーダーについてトランジスタやICを自製するほど、この分野は古くから取り組んでいる(1996年~)。そして、MUSIC(Multiple Signal Classification)という技術により、前方に並走する車両を区別することも可能だという。ステアリングやアクセルなど、さらに高度な運転支援を行うには、ブレーキ操作の対象となり得る物以外、周辺環境の立体的な把握、計測が必要となる。LIDARは赤外線レーザーパルスをスキャンするように照射し、前方の物体の形、距離を測ることができる。デンソーが複数の技術を組み合わせるのは、堅牢性を考えてのポリシーだ。カメラとレーダーの併用なら、片方が故障しても、もう片方のセンサーでシステムを縮退運転させることもできる。ミリ波レーダーとLIDARの組み合わせは冗長と言う考え方も(グーグルカーのプロトタイプはレーザースキャナーによって周辺認知を行っていた)あるが、レーザースキャナー(LIDAR)は、雨など天候の変化に弱い。ミリ波レーダーと併用していれば、前方障害物の検知は可能だ。センシングを単純にすれば、コストも抑えられ製品実装の展開もスピーディに行えるが、可用性、堅牢性の面では、複合システムに劣る場合がある。デンソーのこの戦略は、製品の堅牢性をあげるためと、カメラやセンサーのデバイスメーカーではなく、自社コンポーネントを組み合わせて付加価値の高い製品を提供できるサプライヤーとしての戦略でもある。
なぜ今、純水洗車やボディコーティング、PPFが注目されるのか? カーディテイリング・ビジネスの本質…特別寄稿 ジョイボンド代表 古舘忠夫 2026.6.26 Fri 6:31 車の長期保有化が進む中で注目されるのが、純水洗車やボディコ…
 なぜ今、純水洗車やボディコーティング、PPFが注目されるのか? カーディテイリング・ビジネスの本質…特別寄稿 ジョイボンド代表 古舘忠夫
なぜ今、純水洗車やボディコーティング、PPFが注目されるのか? カーディテイリング・ビジネスの本質…特別寄稿 ジョイボンド代表 古舘忠夫